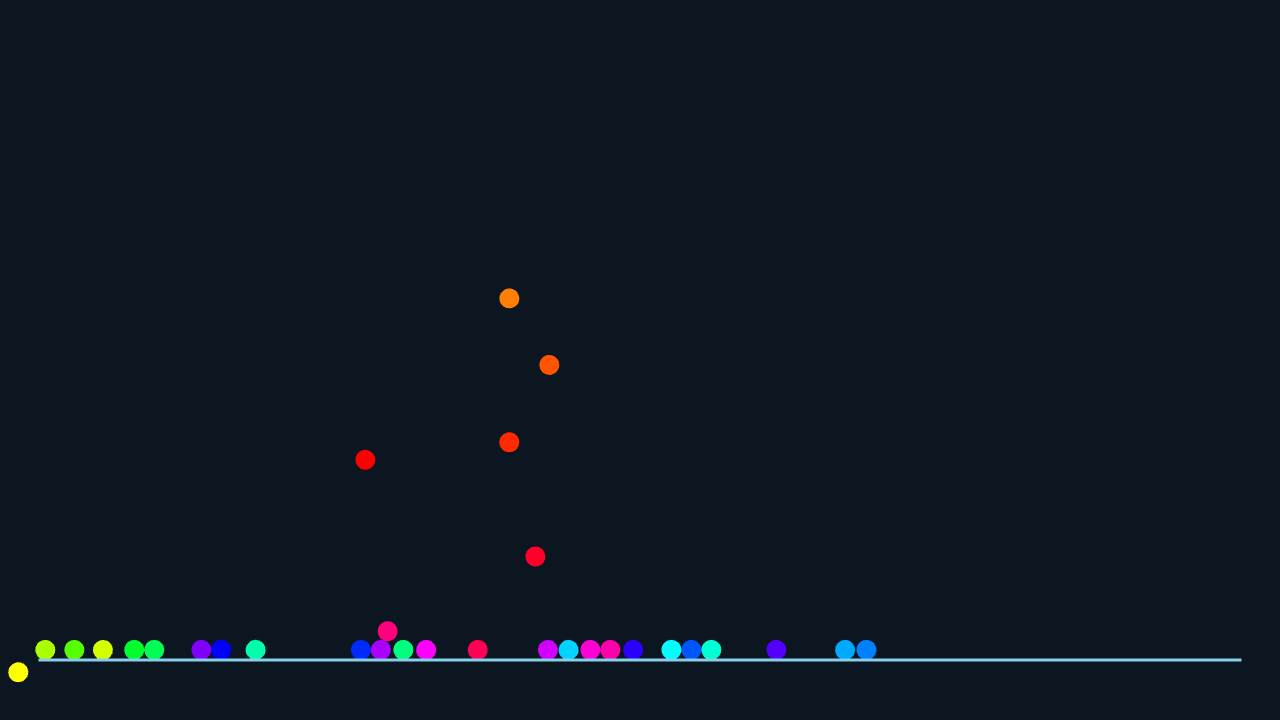
2D Physics Samples¶
1. 2D physics template¶
Code
# include <Siv3D.hpp>
void Main()
{
// Resize window to 1280x720
Window::Resize(1280, 720);
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// Gravitational acceleration (cm/s^2)
constexpr double Gravity = 980;
// 2D physics world
P2World world{ Gravity };
// [_] Ground (floor with width 1200 cm)
const P2Body ground = world.createLine(P2Static, Vec2{ 0, 0 }, Line{ -600, 0, 600, 0 });
// Bodies
Array<P2Body> bodies;
// 2D camera
Camera2D camera{ Vec2{ 0, -300 } };
while (System::Update())
{
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
// Update 2D physics world
world.update(StepTime);
}
// Remove bodies that fell below ground
bodies.remove_if([](const P2Body& b) { return (200 < b.getPos().y); });
// Update 2D camera
camera.update();
{
// Create Transformer2D from 2D camera
const auto t = camera.createTransformer();
// If left clicked
if (MouseL.down())
{
// Create ball with radius 10 cm at clicked location
bodies << world.createCircle(P2Dynamic, Cursor::PosF(), 10);
}
// Draw all bodies
for (const auto& body : bodies)
{
body.draw(HSV{ body.id() * 10.0 });
}
// Draw ground
ground.draw(Palette::Skyblue);
}
// Draw 2D camera controls
camera.draw(Palette::Orange);
}
}
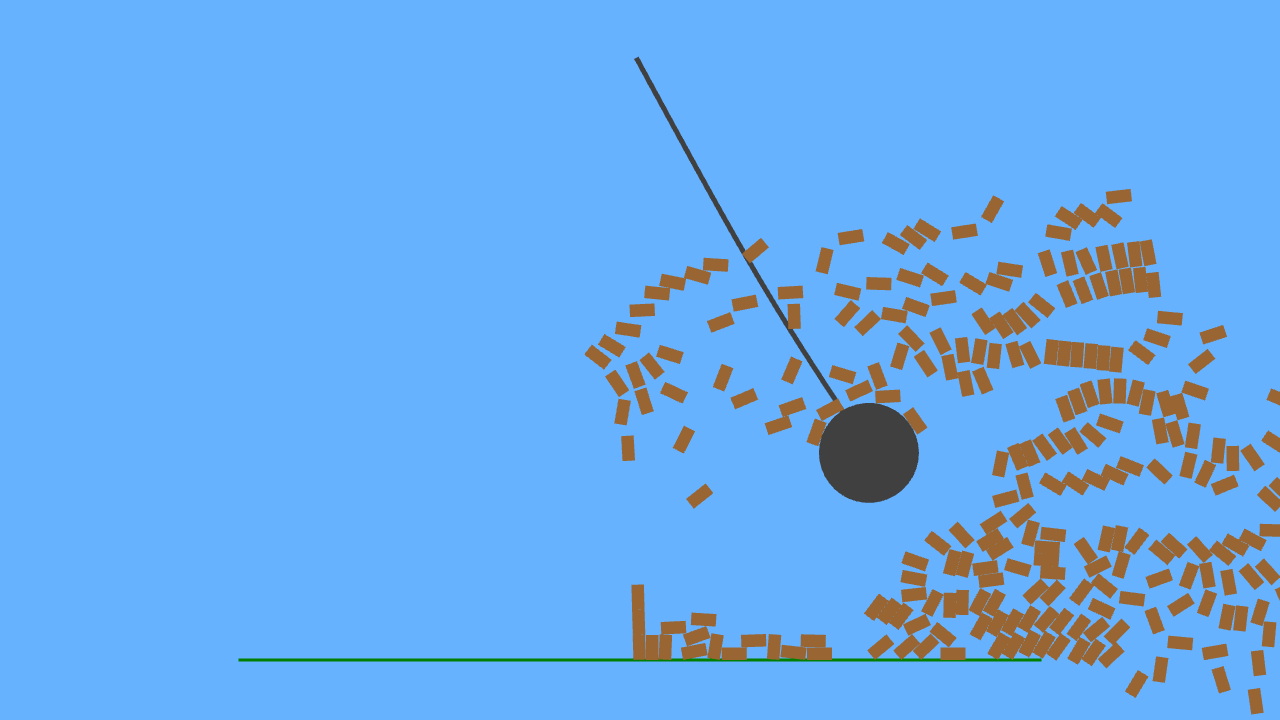
2. Destruction by wrecking ball¶
Code
# include <Siv3D.hpp>
void Main()
{
// Resize window to 1280x720
Window::Resize(1280, 720);
// Set background color
Scene::SetBackground(ColorF{ 0.4, 0.7, 1.0 });
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// 2D physics world
P2World world;
// [_] Ground
const P2Body ground = world.createLine(P2Static, Vec2{ 0, 0 }, Line{ -1600, 0, 1600, 0 });
// [■] Boxes (kept sleeping)
Array<P2Body> boxes;
{
for (auto y : Range(0, 12))
{
for (auto x : Range(0, 20))
{
boxes << world.createRect(P2Dynamic, Vec2{ x * 50, -50 - y * 100 },
SizeF{ 50, 100 }, P2Material{ .density = 0.02, .restitution = 0.0, .friction = 1.0 })
.setAwake(false);
}
}
}
// Pendulum axis coordinates
constexpr Vec2 PivotPos{ 0, -2400 };
// Length of one link in the chain
constexpr double LinkLength = 100.0;
// Number of links in the chain
constexpr int32 LinkCount = 16;
// Chain length
constexpr double ChainLength = (LinkLength * LinkCount);
// Wrecking ball radius
constexpr double BallRadius = 200;
// Initial coordinates of wrecking ball
constexpr Vec2 BallCenter = PivotPos.movedBy(-ChainLength - BallRadius, 0);
// [●] Wrecking ball
const P2Body ball = world.createCircle(P2BodyType::Dynamic, BallCenter, BallRadius,
P2Material{ .density = 0.5, .restitution = 0.0, .friction = 1.0 });
// [ ] Pendulum axis (placeholder with no physical body)
const P2Body pivot = world.createPlaceholder(P2BodyType::Static, PivotPos);
// [-] Links composing the chain
Array<P2Body> links;
// Joints connecting links to each other and to the wrecking ball
Array<P2PivotJoint> joints;
{
for (auto i : step(LinkCount))
{
// Link rectangle (slightly larger to overlap with adjacent links)
const RectF rect{ Arg::rightCenter = PivotPos.movedBy(i * -LinkLength, 0), LinkLength * 1.2, 20 };
// Set categoryBits to 0 to avoid interference with other objects like boxes
links << world.createRect(P2Dynamic, rect.center(), rect.size,
P2Material{ .density = 0.1, .restitution = 0.0, .friction = 1.0 }, P2Filter{ .categoryBits = 0 });
if (i == 0)
{
// Joint connecting pendulum axis and first link
joints << world.createPivotJoint(pivot, links.back(), rect.rightCenter().movedBy(-LinkLength * 0.1, 0));
}
else
{
// Joint connecting new link and previous link
joints << world.createPivotJoint(links[links.size() - 2], links.back(), rect.rightCenter().movedBy(-LinkLength * 0.1, 0));
}
}
// Joint connecting last link and wrecking ball
joints << world.createPivotJoint(links.back(), ball, PivotPos.movedBy(-ChainLength, 0));
}
// [/] Stopper
P2Body stopper = world.createLine(P2Static, BallCenter.movedBy(0, 200), Line{ -400, 200, 400, 0 });
// 2D camera
Camera2D camera{ Vec2{ 0, -1200 }, 0.25 };
while (System::Update())
{
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
// Update 2D physics world
world.update(StepTime);
// Remove fallen boxes
boxes.remove_if([](const P2Body& body) { return (2000 < body.getPos().y); });
}
// Update 2D camera
camera.update();
{
// Create Transformer2D from 2D camera
const auto t = camera.createTransformer();
// Draw ground
ground.draw(ColorF{ 0.0, 0.5, 0.0 });
// Draw chain
for (const auto& link : links)
{
link.draw(ColorF{ 0.25 });
}
// Draw boxes
for (const auto& box : boxes)
{
box.draw(ColorF{ 0.6, 0.4, 0.2 });
}
// Draw stopper
stopper.draw(ColorF{ 0.25 });
// Draw wrecking ball
ball.draw(ColorF{ 0.25 });
}
// Remove stopper
if (stopper && SimpleGUI::Button(U"Go", Vec2{ 1100, 20 }))
{
// Release stopper
stopper.release();
}
// Draw 2D camera controls
camera.draw(Palette::Orange);
}
}
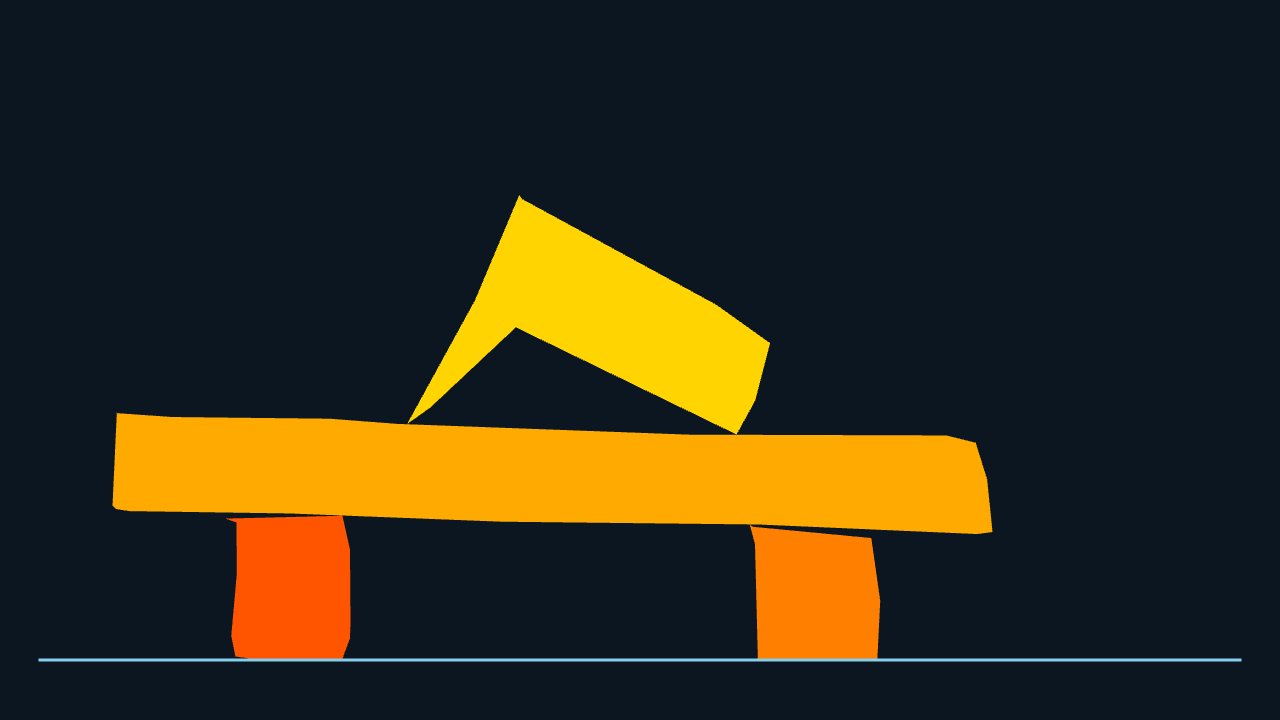
3. Sketch to P2Body¶
Code
# include <Siv3D.hpp>
void Main()
{
// Resize window to 1280x720
Window::Resize(1280, 720);
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// 2D physics world
P2World world;
// [_] Ground
const P2Body ground = world.createLine(P2Static, Vec2{ 0, 0 }, Line{ -600, 0, 600, 0 });
// Bodies
Array<P2Body> bodies;
// 2D camera
Camera2D camera{ Vec2{ 0, -300 } };
LineString points;
while (System::Update())
{
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
// Update 2D physics world
world.update(StepTime);
}
// Remove bodies that fell below ground
bodies.remove_if([](const P2Body& b) { return (200 < b.getPos().y); });
// Update 2D camera
camera.update();
{
// Create Transformer2D from 2D camera
const auto t = camera.createTransformer();
// If left click or mouse movement while clicking occurs
if (MouseL.down() ||
(MouseL.pressed() && (not Cursor::DeltaF().isZero())))
{
points << Cursor::PosF();
}
else if (MouseL.up())
{
points = points.simplified(2.0);
if (const Polygon polygon = Polygon::CorrectOne(points))
{
const Vec2 pos = polygon.centroid();
bodies << world.createPolygon(P2Dynamic, pos, polygon.movedBy(-pos));
}
points.clear();
}
// Draw all bodies
for (const auto& body : bodies)
{
body.draw(HSV{ body.id() * 10.0 });
}
// Draw ground
ground.draw(Palette::Skyblue);
points.draw(3);
}
// Draw 2D camera controls
camera.draw(Palette::Orange);
}
}
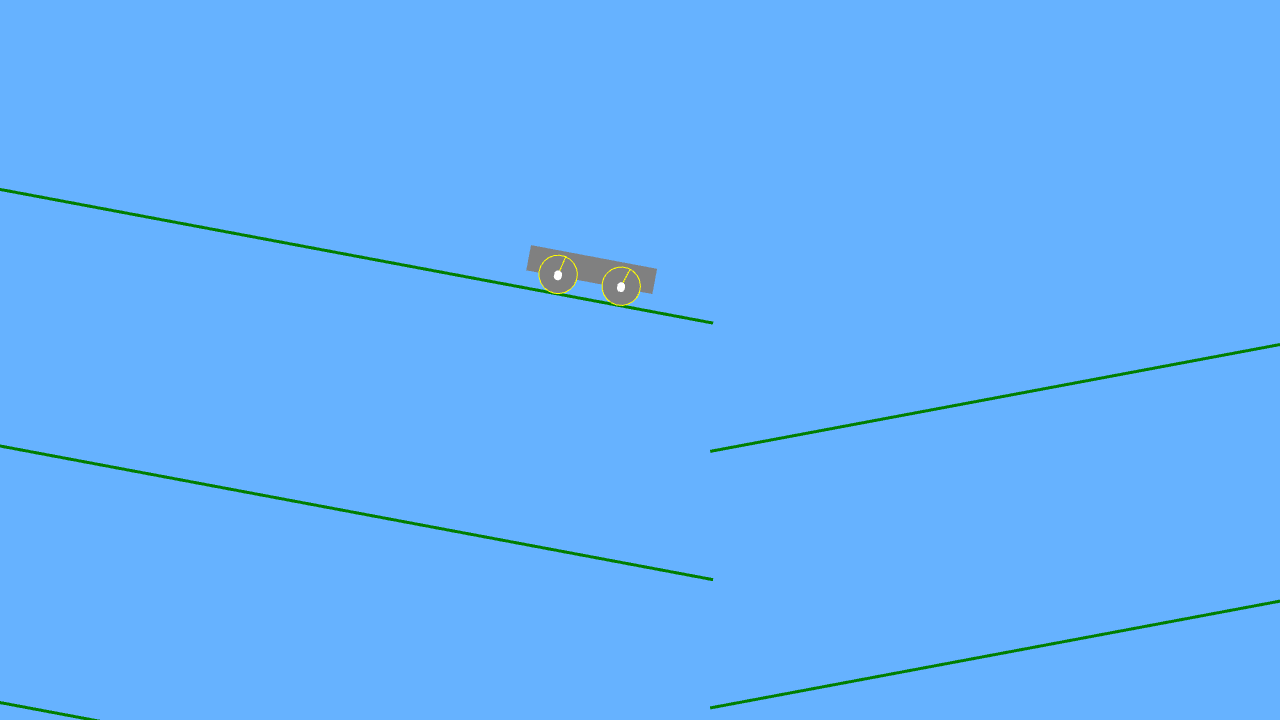
4. Cart¶
Code
# include <Siv3D.hpp>
void Main()
{
// Resize window to 1280x720
Window::Resize(1280, 720);
// Set background color
Scene::SetBackground(ColorF{ 0.4, 0.7, 1.0 });
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// 2D physics world
P2World world;
// [_] Ground
Array<P2Body> floors;
{
floors << world.createLine(P2Static, Vec2{ 0, 0 }, Line{ -1600, 0, 1600, 0 });
for (auto i : Range(1, 5))
{
if (IsEven(i))
{
floors << world.createLine(P2Static, Vec2{ 0, 0 }, Line{ 0, -i * 200, 1600, -i * 200 - 300 });
}
else
{
floors << world.createLine(P2Static, Vec2{ 0, 0 }, Line{ -1600, -i * 200 - 300, 0, -i * 200 });
}
}
}
// [🚙] Car
const P2Body carBody = world.createRect(P2Dynamic, Vec2{ -1500, -1450 }, SizeF{ 200, 40 });
const P2Body wheelL = world.createCircle(P2Dynamic, Vec2{ -1550, -1430 }, 30);
const P2Body wheelR = world.createCircle(P2Dynamic, Vec2{ -1450, -1430 }, 30);
const P2WheelJoint wheelJointL = world.createWheelJoint(carBody, wheelL, wheelL.getPos(), Vec2{ 0, -1 })
.setLinearStiffness(4.0, 0.7)
.setLimits(-5, 5).setLimitsEnabled(true);
const P2WheelJoint wheelJointR = world.createWheelJoint(carBody, wheelR, wheelR.getPos(), Vec2{ 0, -1 })
.setLinearStiffness(4.0, 0.7)
.setLimits(-5, 5).setLimitsEnabled(true);
// Mouse joint
P2MouseJoint mouseJoint;
// 2D camera
Camera2D camera{ Vec2{ 0, -1200 }, 0.25 };
while (System::Update())
{
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
world.update(StepTime);
}
// Update 2D camera
camera.update();
{
// Create Transformer2D from 2D camera
const auto t = camera.createTransformer();
if (MouseL.down())
{
mouseJoint = world.createMouseJoint(carBody, Cursor::PosF())
.setMaxForce(carBody.getMass() * 5000.0)
.setLinearStiffness(2.0, 0.7);
}
else if (MouseL.pressed())
{
mouseJoint.setTargetPos(Cursor::PosF());
}
else if (MouseL.up())
{
mouseJoint.release();
}
// Draw ground
for (const auto& floor : floors)
{
floor.draw(ColorF{ 0.0, 0.5, 0.0 });
}
carBody.draw(Palette::Gray);
wheelL.draw(Palette::Gray).drawWireframe(1, Palette::Yellow);
wheelR.draw(Palette::Gray).drawWireframe(1, Palette::Yellow);
mouseJoint.draw();
wheelJointL.draw();
wheelJointR.draw();
}
// Draw 2D camera controls
camera.draw(Palette::Orange);
}
}
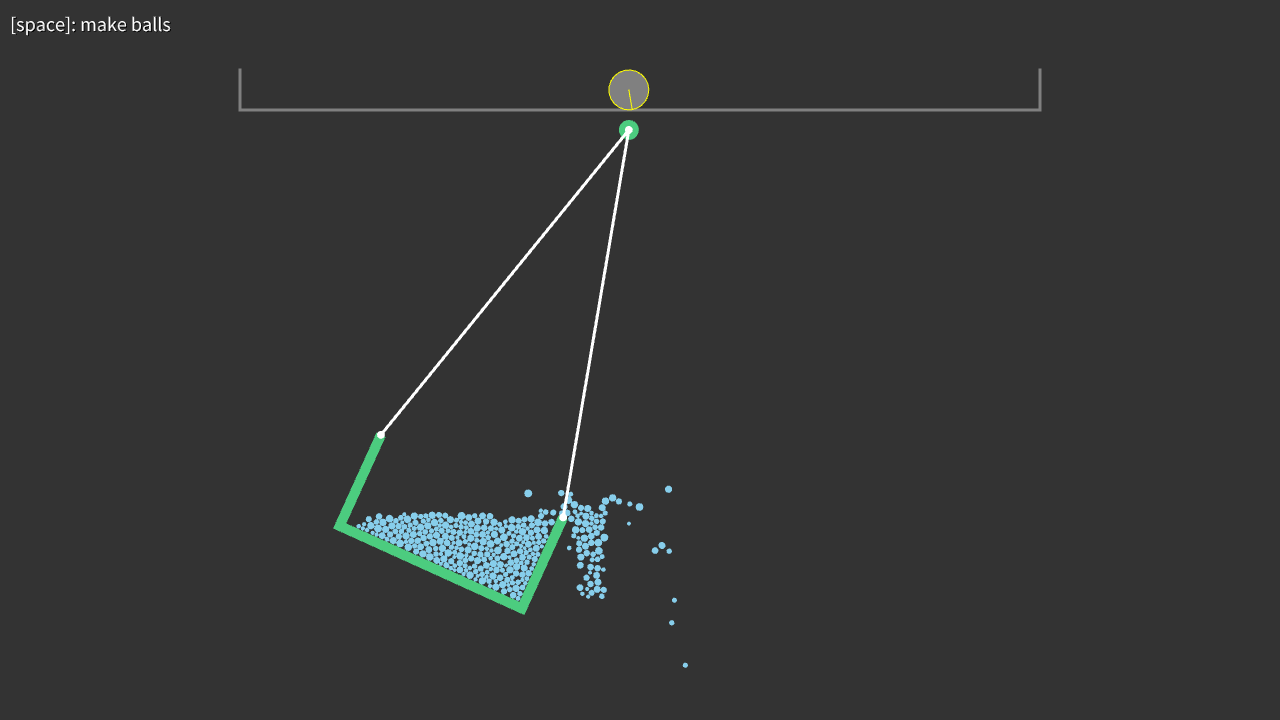
5. Pulley system¶
Code
# include <Siv3D.hpp>
void Main()
{
// Resize window to 1280x720
Window::Resize(1280, 720);
// Set background color
Scene::SetBackground(ColorF{ 0.2 });
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// 2D physics world
P2World world;
const P2Body rail = world.createLineString(P2Static, Vec2{ 0, -400 }, { Vec2{-400, -40}, Vec2{-400, 0}, Vec2{400, 0}, {Vec2{400, -40}} });
const P2Body wheel = world.createCircle(P2Dynamic, Vec2{ 0, -420 }, 20);
const P2Body car = world.createCircle(P2Dynamic, Vec2{ 0, -380 }, 10).setFixedRotation(true);
// Wheel joint
const P2WheelJoint wheelJoint = world.createWheelJoint(car, wheel, wheel.getPos(), Vec2{ 0, 1 })
.setLimitsEnabled(true);
const P2Body box = world.createPolygon(P2Dynamic, Vec2{ 0, 0 }, LineString{ Vec2{-100, 0}, Vec2{-100, 100}, Vec2{100, 100}, {Vec2{100, 0}} }.calculateBuffer(5), P2Material{ .friction = 0.0 });
// Distance joints
const P2DistanceJoint distanceJointL = world.createDistanceJoint(car, car.getPos(), box, Vec2{ -100, 0 }, 400);
const P2DistanceJoint distanceJointR = world.createDistanceJoint(car, car.getPos(), box, Vec2{ 100, 0 }, 400);
Array<P2Body> balls;
// Mouse joint
P2MouseJoint mouseJoint;
// 2D camera
Camera2D camera{ Vec2{ 0, -150 } };
Print << U"[space]: make balls";
while (System::Update())
{
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
world.update(StepTime);
}
// Remove spilled balls
balls.remove_if([](const P2Body& b) { return (600 < b.getPos().y); });
// Update 2D camera
camera.update();
{
// Create Transformer2D from 2D camera
const auto t = camera.createTransformer();
// Mouse joint interaction
if (MouseL.down())
{
mouseJoint = world.createMouseJoint(box, Cursor::PosF())
.setMaxForce(box.getMass() * 5000.0)
.setLinearStiffness(2.0, 0.7);
}
else if (MouseL.pressed())
{
mouseJoint.setTargetPos(Cursor::PosF());
}
else if (MouseL.up())
{
mouseJoint.release();
}
if (KeySpace.pressed())
{
// Add balls
balls << world.createCircle(P2Dynamic, Cursor::PosF(), Random(2.0, 4.0), P2Material{ .density = 0.001, .restitution = 0.5, .friction = 0.0 });
}
rail.draw(Palette::Gray);
wheel.draw(Palette::Gray).drawWireframe(1, Palette::Yellow);
car.draw(ColorF{ 0.3, 0.8, 0.5 });
box.draw(ColorF{ 0.3, 0.8, 0.5 });
for (const auto& ball : balls)
{
ball.draw(Palette::Skyblue);
}
distanceJointL.draw();
distanceJointR.draw();
mouseJoint.draw();
}
// Draw 2D camera controls
camera.draw(Palette::Orange);
}
}
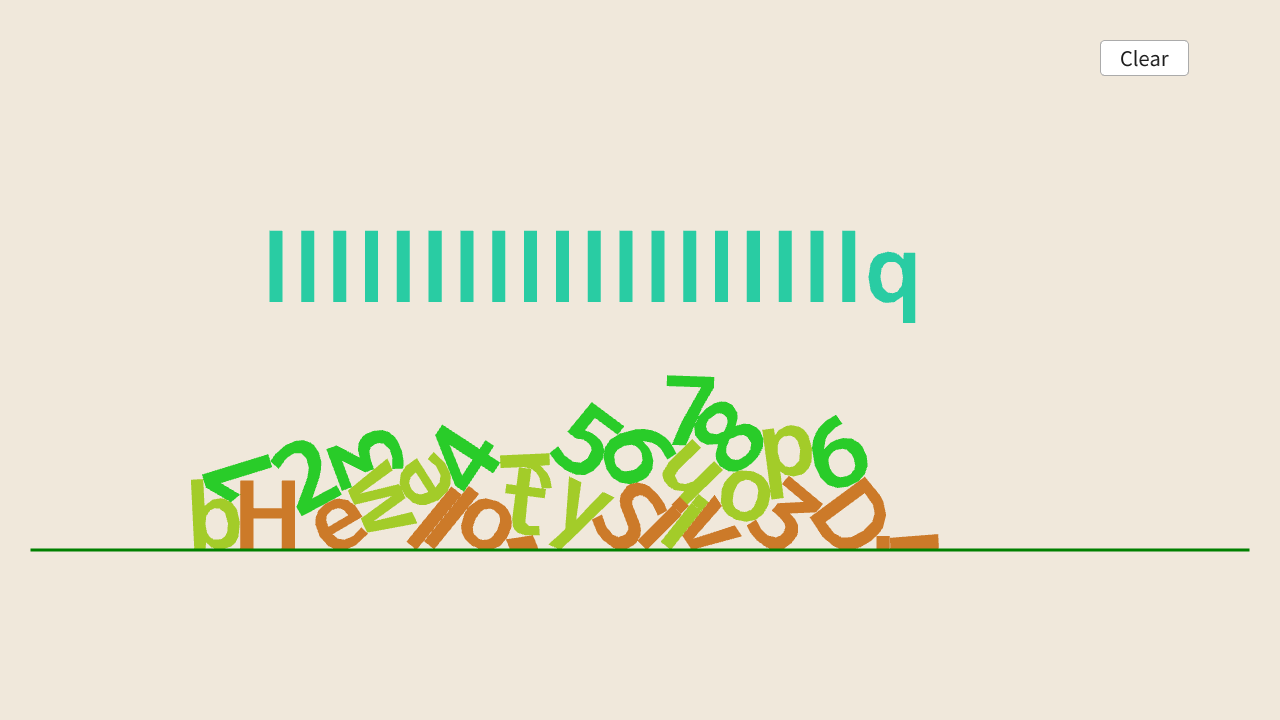
6. Text to P2Body¶
Code
# include <Siv3D.hpp>
void Main()
{
Window::Resize(1280, 720);
Scene::SetBackground(ColorF{ 0.94, 0.91, 0.86 });
const Font font{ 100, Typeface::Bold };
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// Physics world
P2World world;
// Floor
const P2Body line = world.createLine(P2Static, Vec2{ 0, 0 }, Line{ -1600, 0, 1600, 0 }, OneSided::Yes, P2Material{ 1.0, 0.1, 1.0 });
// Text parts
Array<P2Body> bodies;
String text;
int32 generation = 0;
HashTable<P2BodyID, int32> table;
// 2D camera
Camera2D camera{ Vec2{ 0, -500 }, 0.38, Camera2DParameters::MouseOnly() };
constexpr Vec2 textPos{ -400, -500 };
while (System::Update())
{
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
// Update 2D physics world
world.update(StepTime);
}
// Input text
TextInput::UpdateText(text);
// Update 2D camera
camera.update();
{
// Create Transformer2D that applies 2D camera
const auto t = camera.createTransformer();
// Draw bodies with colors based on generation
for (const auto& body : bodies)
{
body.draw(HSV{ (table[body.id()] * 45 + 30), 0.8, 0.8 });
}
// Draw floor
line.draw(Palette::Green);
const String currentText = (text + TextInput::GetEditingText());
// Draw input text
{
const Transformer2D scaling{ Mat3x2::Scale(2.5) };
font(currentText).draw(textPos, ColorF{ 0.5 });
}
// Convert text to P2Body when newline character is entered
if (currentText.includes(U'\n'))
{
// Convert input text to PolygonGlyph
const Array<PolygonGlyph> glyphs = font.renderPolygons(currentText.removed(U'\n'));
// Get polygons to create P2Body
Array<Polygon> polygons;
{
Vec2 penPos{ textPos };
for (const auto& glyph : glyphs)
{
for (const auto& polygon : glyph.polygons)
{
polygons << polygon
.movedBy(penPos + glyph.getOffset())
.scaled(2.5)
.simplified(2.0);
}
penPos.x += glyph.xAdvance;
}
}
for (const auto& polygon : polygons)
{
bodies << world.createPolygon(P2Dynamic, Vec2{ 0, 0 }, polygon, P2Material{ 1, 0.0, 0.4 });
// Save current generation
table[bodies.back().id()] = generation;
}
text.clear();
// Advance generation
++generation;
}
// Display 2D camera and right-click UI
camera.draw(Palette::Orange);
}
// Clear button
if (SimpleGUI::Button(U"Clear", Vec2{ 1100, 40 }))
{
bodies.clear();
}
}
}
7. Force-based movement¶
Code
# include <Siv3D.hpp>
void Main()
{
// Resize window to 1280x720
Window::Resize(1280, 720);
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// Gravitational acceleration (cm/s^2)
constexpr double Gravity = 980;
// 2D physics world
P2World world{ Gravity };
// [_] Ground (floor with width 1200 cm)
const P2Body ground = world.createLine(P2Static, Vec2{ 0, 0 }, Line{ -600, 0, 600, 0 });
// Body
P2Body box = world.createRect(P2Dynamic, Vec2{ -400, -100 }, SizeF{ 50, 100 })
.setFixedRotation(true); // Prevent rotation
// 2D camera
Camera2D camera{ Vec2{ 0, -300 }, 1.0, CameraControl::Mouse };
while (System::Update())
{
ClearPrint();
Print << box.getVelocity();
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
// If [←] key is pressed
if (KeyLeft.pressed())
{
// Apply leftward force to body
box.applyForce(Vec2{ -60000, 0 } * StepTime);
}
// If [→] key is pressed
if (KeyRight.pressed())
{
// Apply rightward force to body
box.applyForce(Vec2{ 60000, 0 } * StepTime);
}
// Update 2D physics world
world.update(StepTime);
}
// If [↑] key is pressed
if (KeyUp.down())
{
// Apply upward force to body
box.applyLinearImpulse(Vec2{ 0, -300 });
}
// Update 2D camera
camera.update();
{
// Create Transformer2D from 2D camera
const auto t = camera.createTransformer();
// Draw all bodies
box.draw();
// Draw ground
ground.draw(Palette::Skyblue);
}
// Draw 2D camera controls
camera.draw(Palette::Orange);
}
}
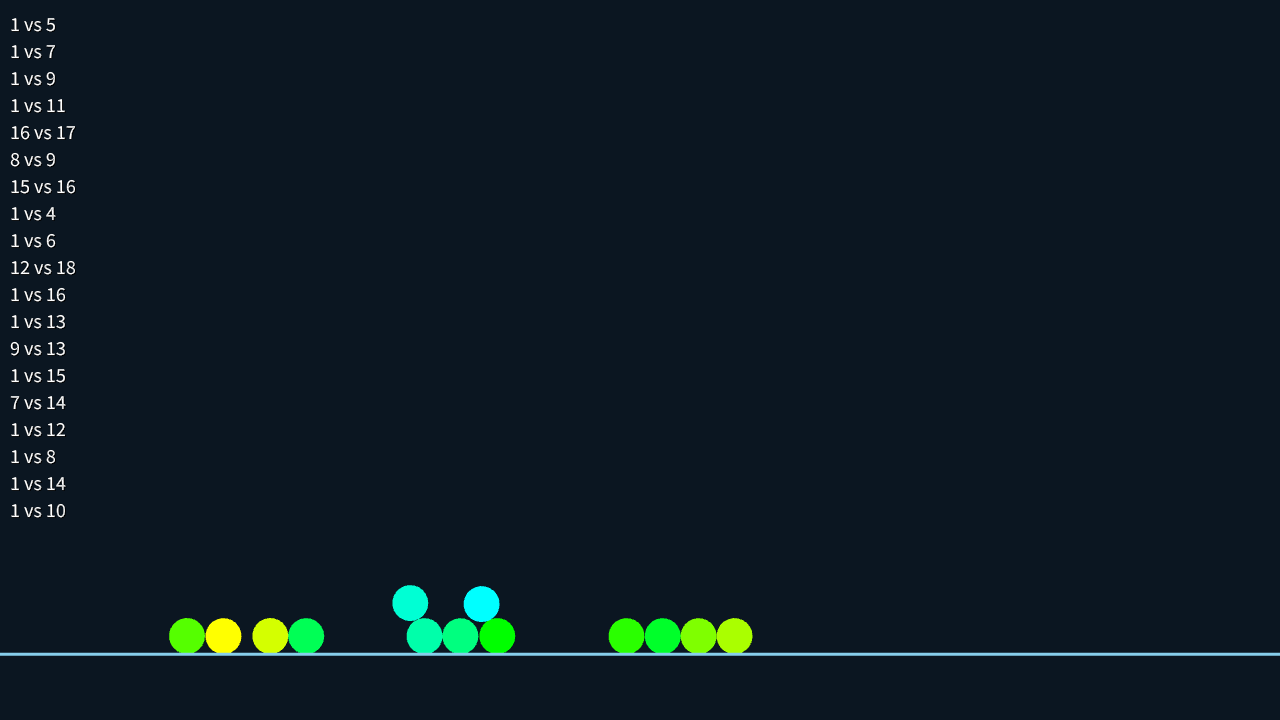
8. Collision detection¶
Code
# include <Siv3D.hpp>
void Main()
{
// Resize window to 1280x720
Window::Resize(1280, 720);
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// Gravitational acceleration (cm/s^2)
constexpr double Gravity = 980;
// 2D physics world
P2World world{ Gravity };
// [_] Ground (floor with width 1200 cm)
const P2Body ground = world.createLine(P2Static, Vec2{ 0, 0 }, Line{ -600, 0, 600, 0 });
// Bodies
Array<P2Body> bodies;
// 2D camera
Camera2D camera{ Vec2{ 0, -300 } };
while (System::Update())
{
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
ClearPrint();
// Update 2D physics world
world.update(StepTime);
// Display IDs of bodies in contact
for (auto&& [pair, collision] : world.getCollisions())
{
Print << pair.a << U" vs " << pair.b;
}
}
// Remove bodies that fell below ground
bodies.remove_if([](const P2Body& b) { return (200 < b.getPos().y); });
// Update 2D camera
camera.update();
{
// Create Transformer2D from 2D camera
const auto t = camera.createTransformer();
// If left clicked
if (MouseL.down())
{
// Create ball with radius 10 cm at clicked location
bodies << world.createCircle(P2Dynamic, Cursor::PosF(), 10);
}
// Draw all bodies
for (const auto& body : bodies)
{
body.draw(HSV{ body.id() * 10.0 });
}
// Draw ground
ground.draw(Palette::Skyblue);
}
// Draw 2D camera controls
camera.draw(Palette::Orange);
}
}
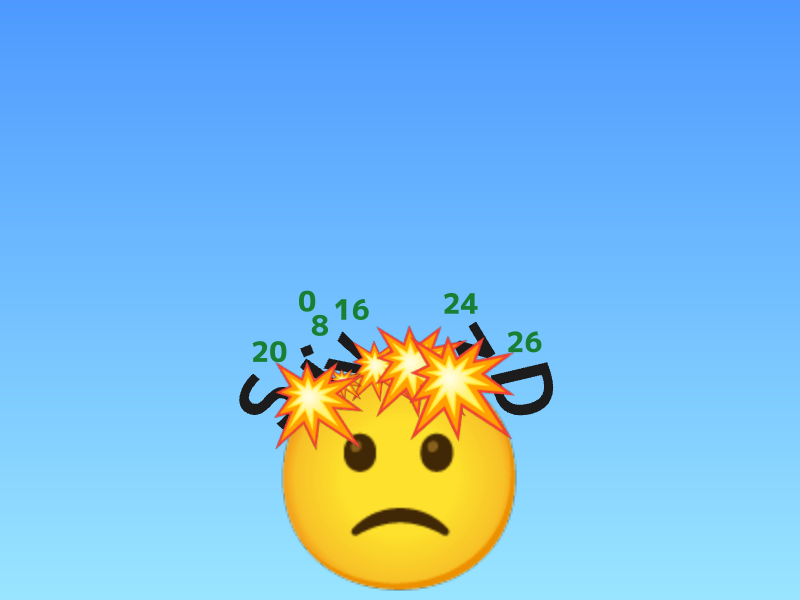
9. Impact detection¶
Code
# include <Siv3D.hpp>
// Collision effect
struct DamageEffect : IEffect
{
Vec2 m_center;
double m_scale;
Texture m_texture;
DamageEffect(const Vec2& center, double scale, const Texture& texture)
: m_center{ center }
, m_scale{ scale }
, m_texture{ texture } {}
bool update(double t) override
{
const double scale = (m_scale * (t - 0.5));
m_texture.scaled(scale).drawAt(m_center);
return (t < 0.5);
}
};
void Main()
{
Scene::SetBackground(ColorF{ 0.94, 0.91, 0.86 });
const Font font{ 80, Typeface::Bold };
const Font damageFont{ FontMethod::MSDF, 48, Typeface::Heavy };
const Texture face0{ U"😮💨"_emoji };
const Texture face1{ U"🙁"_emoji };
const Texture face2{ U"😣"_emoji };
const Texture collisionTexture{ U"💥"_emoji };
Effect effect;
// 2D physics simulation step (seconds)
constexpr double StepTime = (1.0 / 200.0);
// 2D physics simulation accumulated time (seconds)
double accumulatedTime = 0.0;
// Physics world
P2World world;
// Face body
const P2Body faceBody = world.createCircle(P2Static, Vec2{ 0, 0 }, 110, P2Material{ 1.0, 0.1, 1.0 });
// Text parts
Array<P2Body> bodies;
String text;
// Table of body IDs and damage amounts dealt
HashTable<P2BodyID, int32> table;
// 2D camera
Camera2D camera{ Vec2{ 0, -180 }, 1.0, Camera2DParameters::NoControl() };
constexpr Vec2 TextPos{ -120, -480 };
// Pain amount
double pain = 0.0;
double painVelocity = 0.0;
while (System::Update())
{
for (accumulatedTime += Scene::DeltaTime(); StepTime <= accumulatedTime; accumulatedTime -= StepTime)
{
// Update 2D physics world
world.update(StepTime);
// Bodies in contact
for (auto&& [pair, collision] : world.getCollisions())
{
// For each contact
for (const auto& contact : collision)
{
// Damage amount
const int32 damage = (contact.normalImpulse / 4.0);
// If damage amount is 1.0 or more
if (1.0 < damage)
{
// If contact partner is face body
if (pair.a == faceBody.id())
{
table[pair.b] += damage;
}
else if (pair.b == faceBody.id())
{
table[pair.a] += damage;
}
// Increase pain amount
pain += damage;
// Add collision effect
effect.add<DamageEffect>(contact.point, (damage / 10.0), collisionTexture);
}
}
}
}
// Remove objects that fell down
bodies.remove_if([&](const P2Body& b)
{
if (200 < b.getPos().y)
{
table.erase(b.id());
return true;
}
return false;
});
// Decay pain
pain = Math::SmoothDamp(pain, 0.0, painVelocity, 0.5);
// Input text
TextInput::UpdateText(text);
// Update 2D camera
camera.update();
{
Scene::Rect().draw(Arg::top(0.3, 0.6, 1.0), Arg::bottom(0.6, 0.9, 1.0));
// Create Transformer2D that applies 2D camera
const auto t = camera.createTransformer();
// Change face expression based on pain amount
((pain < 10.0) ? face0 : (pain < 100.0) ? face1 : face2)
.scaled(2.0)
.drawAt(0, 0);
// Draw falling text
for (const auto& body : bodies)
{
body.draw(ColorF{ 0.11 });
}
// Draw cumulative damage for text
for (const auto& body : bodies)
{
damageFont(table[body.id()]).drawAt(28, body.getPos().movedBy(0, -50), ColorF{ 0.1, 0.5, 0.2 });
}
// Draw collision effects
effect.update();
// Draw input text
const String currentText = (text + TextInput::GetEditingText());
font(currentText).draw(TextPos, ColorF{ 0.11 });
// Convert text to P2Body when newline character is entered
if (currentText.includes(U'\n'))
{
// Convert input text to PolygonGlyph
const Array<PolygonGlyph> glyphs = font.renderPolygons(currentText.removed(U'\n'));
// Get polygons to create P2Body
Array<Polygon> polygons;
{
Vec2 penPos{ TextPos };
for (const auto& glyph : glyphs)
{
for (const auto& polygon : glyph.polygons)
{
polygons << polygon
.movedBy(penPos + glyph.getOffset());
}
penPos.x += glyph.xAdvance;
}
}
for (auto& polygon : polygons)
{
const Vec2 offset = polygon.boundingRect().center();
polygon.moveBy(-offset);
bodies << world.createPolygon(P2Dynamic, offset, polygon, P2Material{ 1, 0.0, 0.4 });
// Cumulative damage value dealt by that character
table[bodies.back().id()] = 0;
}
text.clear();
}
}
}
}
10. Top-down 2D shooter¶
A sample top-down 2D shooting game using 2D physics features.
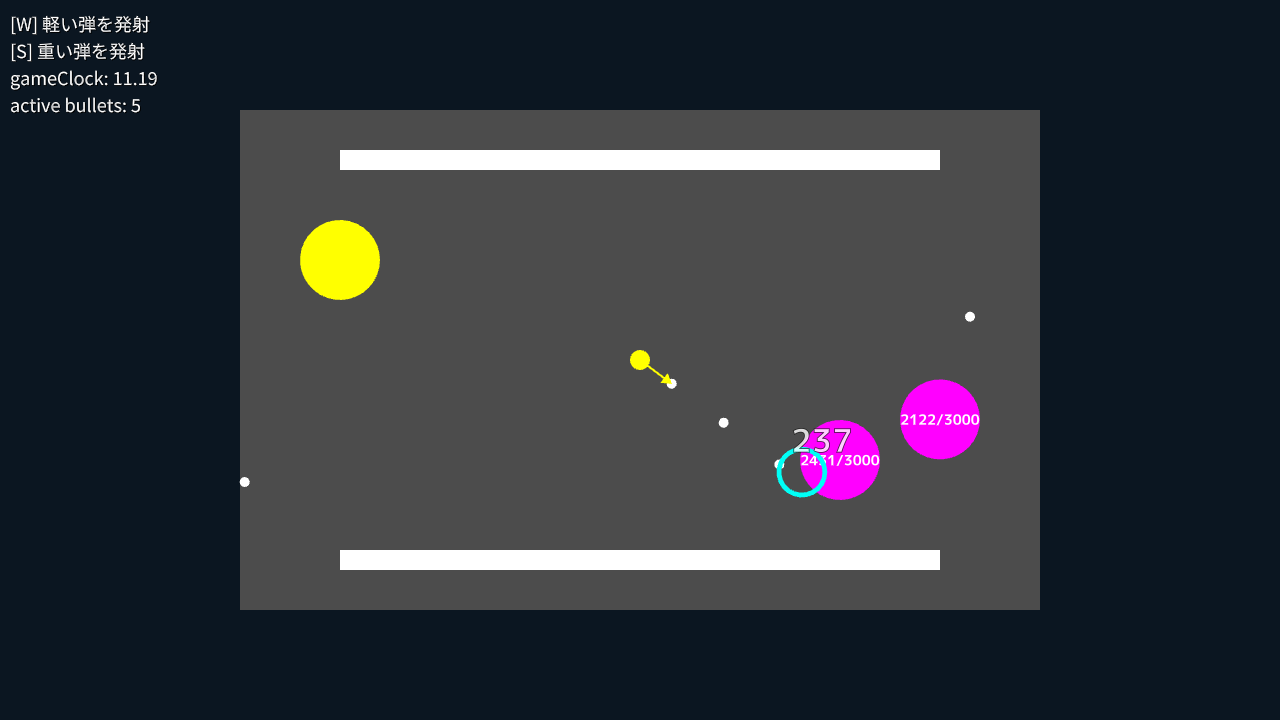
Siv3D-Sample | Top-down 2D shooter
11. 2D physics destruction game¶
Game Patterns | 2D physics destruction game
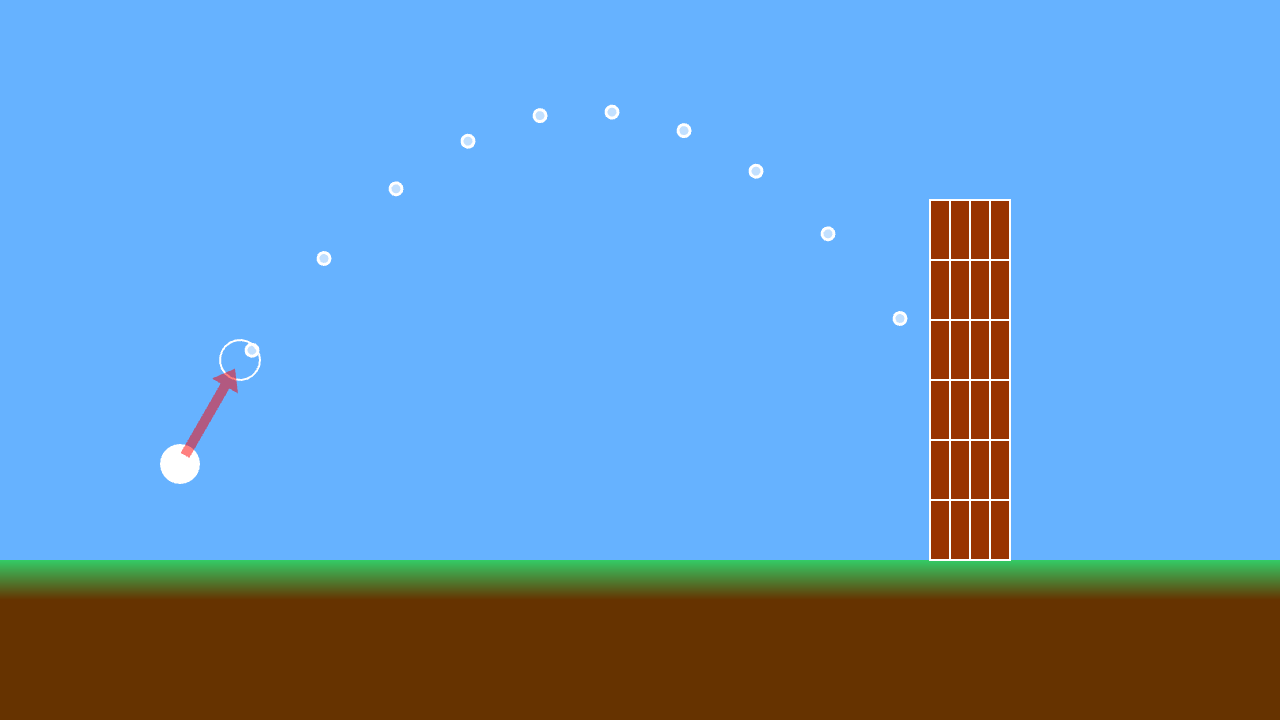
12. 2D Platformer¶
- A sample 2D platformer that supports left/right movement, jumping, and dropping through floors.
Code
# include <Siv3D.hpp> // Siv3D v0.6.16
/// @brief Player state
struct PlayerState
{
/// @brief Player size (distance from the center to the head, and from the center to the feet)
static constexpr double PlayerSizeHalf = 30.0;
/// @brief Tolerance (epsilon) for collision detection
static constexpr double ContactEpsilon = 2.0;
/// @brief Jump impulse magnitude
static constexpr double JumpImpulse = 12.0;
/// @brief Force for left/right movement
static constexpr double WalkForce = 4000.0;
/// @brief Strength of air resistance proportional to the player's horizontal speed
static constexpr double LinearDrag = 16.0;
/// @brief Player velocity
Vec2 velocity{ 0, 0 };
/// @brief Player position
Vec2 position{ 0, 0 };
/// @brief Time since the last jump
double jumpTime = 0.0;
/// @brief Flag indicating whether the player is standing on a floor (i.e., can jump)
bool isStandingOnFloor = false;
/// @brief Flag indicating whether the Down key is pressed
bool downKeyPressed = false;
/// @brief Returns whether the player is rising.
/// @param epsilon Velocity threshold to be considered rising
/// @return true if the player is rising, otherwise false
bool isRising(double epsilon = 1.0) const
{
return (velocity.y < -epsilon);
}
/// @brief Returns the player's foot Y coordinate.
/// @return The player's foot Y coordinate
double footY() const
{
return (position.y + PlayerSizeHalf);
}
/// @brief Visualizes the player's state.
void draw() const
{
if (isRising())
{
Line{ position.x, (position.y + 12), position.x, (position.y - 12) }
.drawArrow(8, SizeF{ 18, 10 }, ColorF{ 0.1 });
}
else if (downKeyPressed)
{
Line{ position.x, (position.y - 12), position.x, (position.y + 12) }
.drawArrow(8, SizeF{ 18, 10 }, ColorF{ 0.1 });
}
if (isStandingOnFloor)
{
position.withY(footY()).asCircle(6).draw(ColorF{ 0.1 });
}
}
};
/// @brief Updates the player's movement.
/// @param playerBody Player body
/// @param playerState Player state
/// @param deltaTime Time delta used for the update
void UpdatePlayer(P2Body& playerBody, PlayerState& playerState, double deltaTime = Scene::DeltaTime())
{
// Left/right movement
{
// Air resistance proportional to the current speed
const double drag = (playerBody.getVelocity().x * -PlayerState::LinearDrag);
if (KeyLeft.pressed())
{
// If the left key is pressed, apply force to the left
playerBody.applyForce(Vec2{ ((-PlayerState::WalkForce + drag) * deltaTime), 0 });
}
else if (KeyRight.pressed())
{
// If the right key is pressed, apply force to the right
playerBody.applyForce(Vec2{ ((PlayerState::WalkForce + drag) * deltaTime), 0 });
}
}
// While descending, not standing on a floor
if (playerBody.getVelocity().y > 0)
{
playerState.isStandingOnFloor = false;
}
// Jump
{
playerState.jumpTime += deltaTime;
if (playerState.isStandingOnFloor && KeyUp.down())
{
// Apply an impulse upward
playerBody.applyLinearImpulse(Vec2{ 0, -PlayerState::JumpImpulse });
// Reset jump timer
playerState.jumpTime = 0.0;
// After jumping, the player is no longer standing on a floor
playerState.isStandingOnFloor = false;
}
}
// Update whether the Down key is pressed
playerState.downKeyPressed = KeyDown.pressed();
}
/// @brief Determines whether a floor is passable.
/// @param floor Floor body to test
/// @param playerState Player state
/// @return true if passable, otherwise false
static bool IsPassable(const P2Body& floor, const PlayerState& playerState)
{
// Always passable when the Down key is pressed
if (playerState.downKeyPressed)
{
return true;
}
// Always passable while the player is rising
if (playerState.isRising())
{
return true;
}
// While descending, only floors above the player's feet (smaller Y) are passable
return (floor.getPos().y < (playerState.footY() - PlayerState::ContactEpsilon));
}
/// @brief Determines whether the player has landed on a floor.
/// @param world World
/// @param playerBody Player body
/// @param playerState Player state
/// @return true if landed, otherwise false
static bool HasLanded(const P2World& world, const P2Body& playerBody, const PlayerState& playerState)
{
for (auto&& [pair, collision] : world.getCollisions())
{
// Consider only collisions involving the player
if ((pair.a == playerBody.id()) || (pair.b == playerBody.id()))
{
for (const auto& contact : collision)
{
// If the contact point is near the player's feet, treat as landed
if (contact.point.y > (playerState.footY() - PlayerState::ContactEpsilon))
{
return true;
}
}
}
}
return false;
}
/// @brief Draws a pass-through floor.
/// @param floor Pass-through floor body
/// @param playerState Player state
void DrawFloor(const P2Body& floor, const PlayerState& playerState)
{
const auto pLine = std::dynamic_pointer_cast<P2Line>(floor.getPtr(0));
if (IsPassable(floor, playerState))
{
// If passable, draw as a dotted line
pLine->getLine().draw(LineStyle::SquareDot, 5);
}
else
{
// If not passable, draw as a normal line
pLine->getLine().draw(5);
}
}
void Main()
{
Window::Resize(1280, 720);
constexpr double SimulationStepTime = (1.0 / 200.0);
double simulationAccumulatedTime = 0.0;
P2World world;
// Default collision filter for walls
constexpr P2Filter SolidFloorFilter{ .categoryBits = 0b0001, .maskBits = 0b1111 };
// Collision filter for pass-through state
constexpr P2Filter PassableFloorFilter{ .categoryBits = 0b0010, .maskBits = 0b1111 };
// Player collision filter
constexpr P2Filter NormalCharacterFilter{ .categoryBits = 0b0100, .maskBits = 0b1101 };
// Enemy character collision filter
constexpr P2Filter EnemyCharacterFilter{ .categoryBits = 0b1000, .maskBits = 0b1111 };
// Ground body
const P2Body groundFloor = world.createRect(P2Static, Vec2{ 0, 0 }, SizeF{ 800, 10 }, P2Material{ .restitution = 0.0 }, SolidFloorFilter);
// Pass-through floor bodies
Array<P2Body> floors;
floors << world.createLine(P2Static, Vec2{ -200, -100 }, Line{ -150, 0, 150, 0 }, OneSided::No, P2Material{ .restitution = 0.0 }, SolidFloorFilter);
floors << world.createLine(P2Static, Vec2{ -200, -200 }, Line{ -150, 0, 150, 0 }, OneSided::No, P2Material{ .restitution = 0.0 }, SolidFloorFilter);
floors << world.createLine(P2Static, Vec2{ -200, -300 }, Line{ -150, 0, 150, 0 }, OneSided::No, P2Material{ .restitution = 0.0 }, SolidFloorFilter);
// Enemy character body
const P2Body enemyBody = world.createRect(P2Dynamic, Vec2{ -200, -400 }, SizeF{ 30, 30 }, P2Material{ .density = 0.02, .restitution = 0.0, .friction = 1.0 }, EnemyCharacterFilter)
.setFixedRotation(true);
// Player body
P2Body playerBody = world.createRect(P2Dynamic, Vec2{ 0, -300 }, SizeF{ 40, (PlayerState::PlayerSizeHalf * 2) }, P2Material{ .density = 0.1, .restitution = 0.0 }, NormalCharacterFilter)
.setFixedRotation(true);
// Fixed camera
Camera2D fixedCamera{ Vec2{ 0, -200 }, 1.5, CameraControl::None_ };
// Player state
PlayerState playerState{
.velocity = playerBody.getVelocity(),
.position = playerBody.getPos()
};
while (System::Update())
{
// Move the player
UpdatePlayer(playerBody, playerState);
for (simulationAccumulatedTime += Scene::DeltaTime();
(SimulationStepTime <= simulationAccumulatedTime); simulationAccumulatedTime -= SimulationStepTime)
{
// For each pass-through floor
for (auto& floor : floors)
{
// Switch collision filter based on the player's state
const bool isPassable = IsPassable(floor, playerState);
floor.shape(0).setFilter(isPassable ? PassableFloorFilter : SolidFloorFilter);
}
// Step the world forward
world.update(SimulationStepTime);
// Update player state at each step
{
playerState.velocity = playerBody.getVelocity();
playerState.position = playerBody.getPos();
if ((0.1 <= playerState.jumpTime) && HasLanded(world, playerBody, playerState))
{
playerState.isStandingOnFloor = true;
}
}
}
fixedCamera.update();
{
const auto t = fixedCamera.createTransformer();
// Draw background
fixedCamera.getRegion().draw(Arg::top(0.2, 0.6, 0.9), Arg::bottom(0.2, 0.5, 0.4));
// Draw ground
groundFloor.draw(ColorF{ 0.6 });
// Draw pass-through floors
for (const auto& floor : floors)
{
DrawFloor(floor, playerState);
}
// Draw player
playerBody.draw(ColorF{ 0.6, 0.8, 0.7 });
playerState.draw();
// Draw enemy character
enemyBody.draw(ColorF{ 1.0, 0.6, 0.8 });
}
fixedCamera.draw(Palette::Orange);
}
}